17:58 Може котитися по поверхні і ходити, випустивши “ноги”, сферичний робот QRoSS | |
|
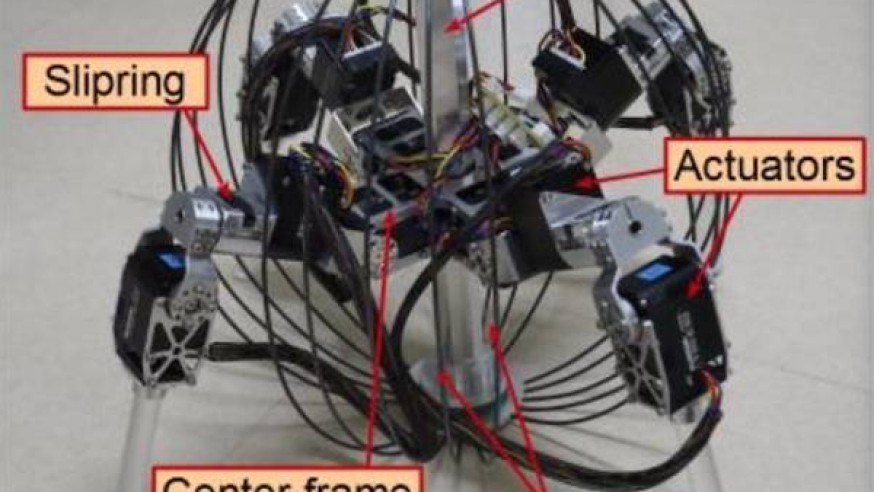
Дослідники почерпнули ідеї, що лягли в конструкцію робота QRoSS, з декількох джерел. І першим джерелом “натхнення” став досить відомий робот MorpHex. Однак, основною різницею між роботами QRoSS і MorpHex є те, що крокуюча рухова система робота QRoSS не пов’язана з його зовнішньою оболонкою і діє абсолютно автономно. А зовнішня оболонка, складена з пружних елементів, діє як свого амортизатор, згладжуючи удари і не допускаючи поломки робота після кидка або під час швидкого руху. Приміром, перебуваючи в зоні стихійного лиха, людина, що знаходиться в безпечному районі, може закинути, немов бейсбольний м’яч, такого робота в потенційно небезпечну область. Підстрибнувши кілька разів і прокотившись деяку відстань, робот QRoSS стане на свої ноги і відправиться виконувати поставлене перед ним завдання. Конструкція ніг робота QRoSS дозволить йому відносно легко переміщатися по найскладнішій поверхні. І в будь-якому небезпечному випадку, у разі втрати рівноваги і падіння з висоти, ноги робота автоматично і дуже швидко ховаються всередину, що запобігає поломці їх досить крихкої конструкції. Ще однією перевагою сферичного робота є його можливість перекочуватися по рівній дорозі. Цей спосіб є більш швидким і ефективним способом переміщення у разі наявності сприятливої для цього поверхні. Пересуваючись на ногах, робот QRoSS здатний розвивати швидкість 0.1 м/с, у той час, як швидкість його кочення становить 0.6 м/с. Робот QRoSS має вагу 2.5 кілограма, а діаметр його “сферичної кулі” становить 30 сантиметрів. Такий великий розмір ще не дозволить кинути його далеко і сильно, немов бейсбольний м’яч, однак, дослідники поки і не переслідували такої мети, вони зосередили свої зусилля на реалізації різних методів пересування робота і методах їх зміни. У конструкції робота використано 12 сервоприводів, по три на кожну з ніг, які виготовлені з комбінації титану і сплаву з пам’яттю форми. Роботом управляє досить проста електроніка, а вся його внутрішня частина захищена пінополіуретановими амортизаторами. У майбутньому японські дослідники збираються максимально мініатюризувати конструкцію робота QRoSS. Адже для того, щоб його можна було ефективно куди-небудь закинути, його розмір повинен вписуватися в розмір кисті людської руки. | |
|
| |
| Всього коментарів: 0 | |
